
Présentation de nos flexfeeders robotisés
CAPEO propose une large gamme de systèmes d’alimentation flexible programmables pour pièces de toutes formes et tailles (jusqu’à 300 mm et 200 g unitaire).
Notre gammes s’interface à tout type et toute marque de robot. Ainsi qu’à toute marque de vision industrielle.
Tous les modèles de cette gamme partagent le même principe de fonctionnement avec des commandes intégrées et une communication normalisée pour une utilisation facilité par vos programmes tiers ; des surfaces d’amenage interchangeable rapidement, un bac de stockage intégré (optionel) et un mécanisme de vidage rapide.
Ainsi vous pouvez passer rapidement et facilement d’une production à l’autre, rendant votre ligne de fabrication agile.
Contrairement aux alimentations traditionnelles (bol vibrant) nos systèmes sont standards et non dédiés. Il peuvent accueillir vos produits d’aujourd’hui et ceux de demain. Nous vous donnons ainsi la possibilité d’amortir votre investissement sur plusieurs projets et sur une période plus longue.
Si jamais dans la vie de votre produit, une modification devenait nécessaire, aucun impact sur la distribution est à prévoir hormis une modification du programme vision ou éventuellement de la surface d’amenage.
En terme d’encombrement au sol, nos systèmes d’alimentation flexible sont compactes-économisant ainsi des m² précieux.
Cette compacité est alliée à une capacité à retourner les pièces qui est la meilleure du marché.
Le principe de base
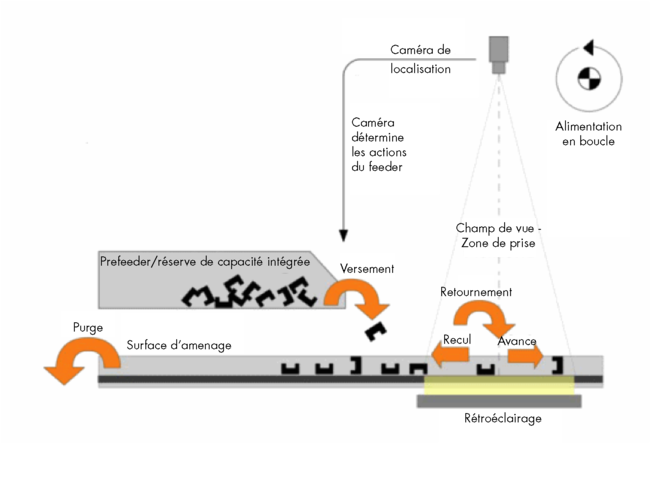
Les pièces en vrac sont distribuées à partir du bac contenance dans la zone de prise robot situées a l’avant du feeder, l’action combinée des deux servomoteurs permet de verser des pièces depuis le bac, les avancer, les retourner, les reculer, selon ce que voit la caméra.
Seuls deux paramètres – la vitesse et la durée du mouvement –sont à ajuster pour personnaliser l’action d’alimentation selon le produit à alimenter.
Un système de vision installé au-dessus de la fenêtre de sélection rétroéclairée analyse l’orientation et la position des pièces distribuées de manière aléatoire et indique au feeder les actions à prendre en cas rupture de disponibilité.
Une connexion Ethernet est utilisée pour transmettre au robot les positions des pièces prenables. Le robot après avoir pris et déposer ces pièces redonne la main au feeder pour en emmener des nouvelles.